
Vehicle Telemetry PCBs
Category
ElectronicsAbout This Project
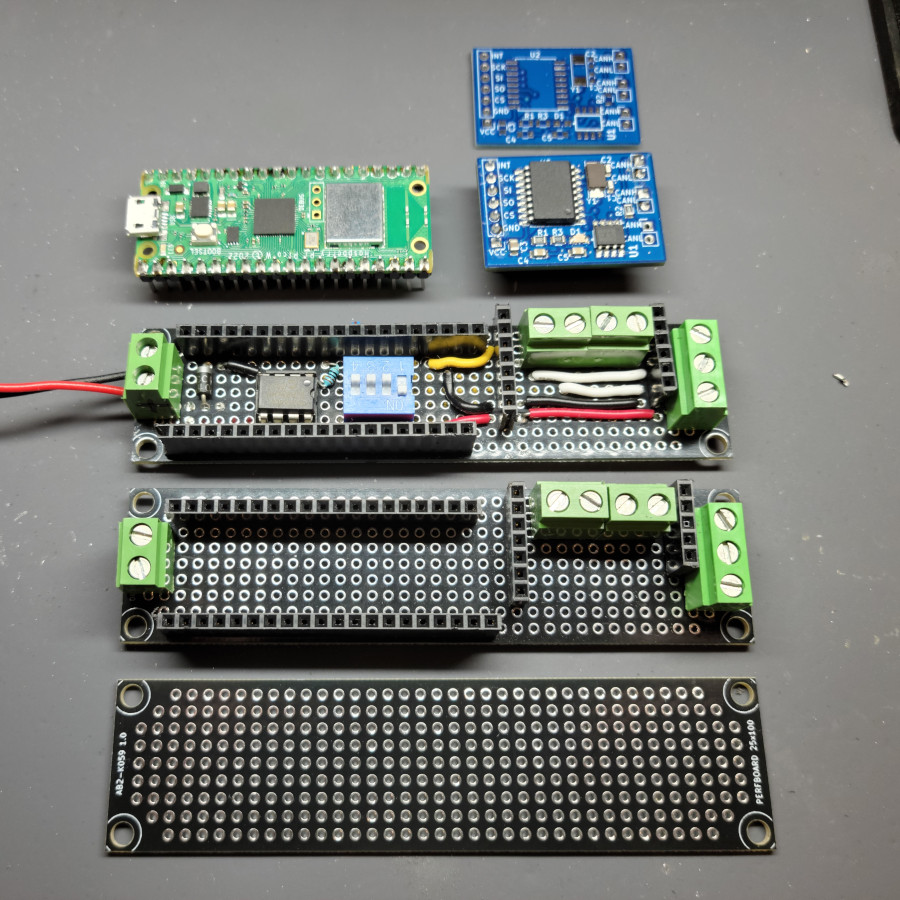
Shown here are the various stages of assembly of a printed circuit board (PCB) designed to add in collecting vehicle telemetry data for the Olin SAE Baja team’s off-road racing car. Aside from the Raspberry Pi Pico, I designed everything shown in this picture, which consists of:
- SPI to CAN module (top right, blue) – I designed this custom PCB to convert between the SPI and CAN communication protocols to facilitate the moving of SPI-native sensor data to a central data collection board using CAN, which allows for better communication over long distances. I designed the PCBs using KiCAD and then assembled them with Olin College’s pick-and-place machine.
- The Raspberry Pi Pico microcontroller, where I wrote custom CircuitPython code to collect the SPI and analog sensor data and send it over CAN. The code automatically assigns an ID based on several switch positions, which allows for running a single version of the code across different locations on the car, decreasing the overhead when making changes.
- Analog sensor data collection using a op-amp.